Motor eléctrico: partes, funcionamiento y tipos
Motores eléctricos: De la electricidad al movimiento (y viceversa)
Cuando enciendes un ventilador, taladras una pared, abres una ventana eléctrica o conduces un coche eléctrico, estás usando un motor eléctrico. Estos dispositivos ingeniosos convierten la energía eléctrica en energía mecánica de rotación gracias a la interacción entre campos magnéticos y corrientes eléctricas (fuerza de Lorentz). Son los caballos de batalla de la industria moderna: se estima que los motores eléctricos consumen más del 40% de la electricidad mundial.
🎯 En este post aprenderás: Las partes esenciales de un motor (rotor, estátor, colector, escobillas), el principio físico de funcionamiento (fuerza de Lorentz y par motor), los diferentes tipos de motores (DC con escobillas, DC sin escobillas BLDC, motor universal, motor de inducción AC, motor paso a paso), cómo calcular par, velocidad y potencia, y las aplicaciones de cada tipo. Además, 5 ejercicios resueltos y la construcción de un motor DC casero.
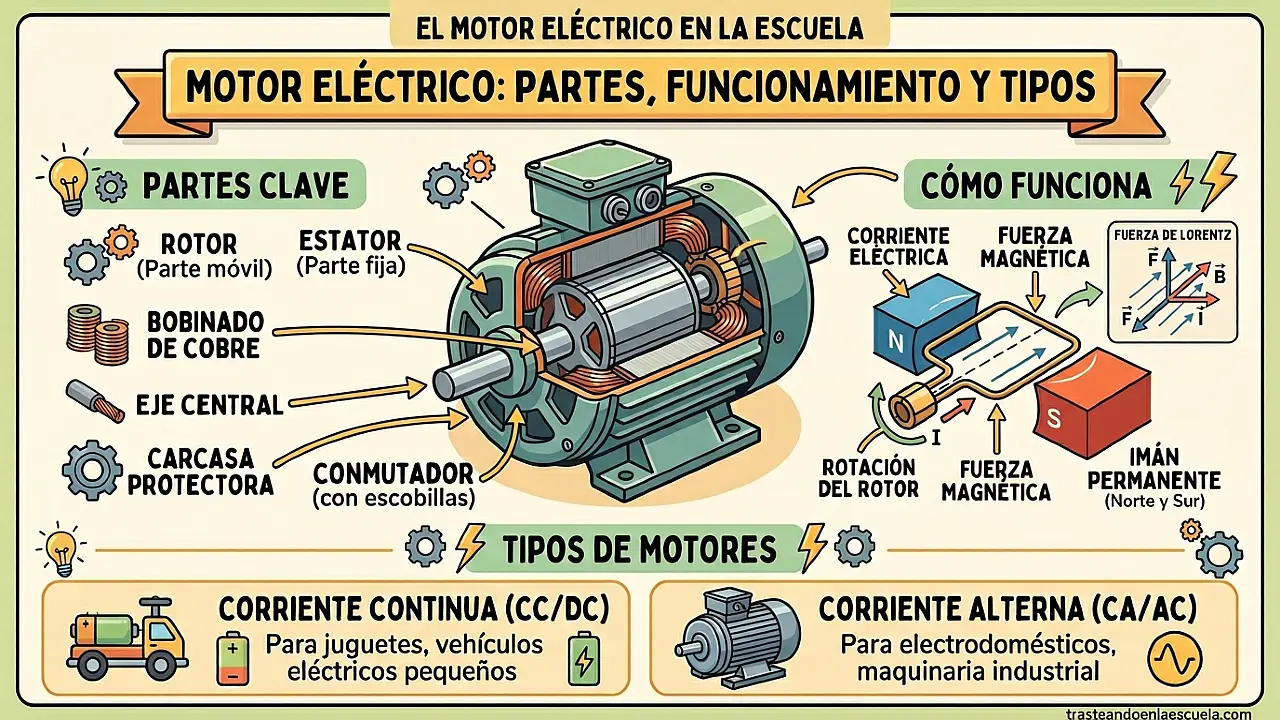
🔧 Partes fundamentales de un motor eléctrico de corriente continua (DC)
🧲 Estátor: la parte fija que crea el campo magnético
El estátor puede ser un imán permanente (en motores pequeños, como juguetes o cepillos de dientes) o un electroimán (en motores grandes, como los de coches eléctricos o industriales). El estátor genera un campo magnético estacionario o giratorio (en motores AC).
🌀 Rotor (inducido): la parte giratoria
El rotor es un conjunto de bobinas de cobre enrolladas sobre un núcleo de hierro laminado (para reducir pérdidas por corrientes de Foucault). Al circular corriente por las bobinas del rotor, se convierte en un electroimán que interactúa con el campo del estátor, produciendo un par de giro.
🖌️ Escobillas y colector (delgas) – solo en motores DC con escobillas
Las escobillas (generalmente de carbón o grafito) rozan el colector, que es un cilindro segmentado (delgas) conectado a las bobinas del rotor. Cada media vuelta, el colector invierte la polaridad de la corriente en las bobinas, manteniendo el giro continuo. Las escobillas se desgastan con el uso y producen chispas, por lo que los motores modernos tienden a ser sin escobillas (BLDC).
🔄 Principio de funcionamiento motor DC simple (una espira)
Paso 1: La corriente circula por la espira (rotor) dentro del campo magnético del estátor (imanes permanentes). La fuerza de Lorentz actúa sobre cada lado de la espira: F = I·L·B, perpendicular a la corriente y al campo. En un lado la fuerza va hacia arriba, en el lado opuesto hacia abajo, creando un par de giro.
Paso 2: La espira gira hasta quedar en posición vertical (ángulo 0°). En ese momento, el par es cero (las fuerzas son colineales).
Paso 3: El colector (delgas) invierte la corriente justo en esa posición, de modo que ahora la corriente en los lados es opuesta, y las fuerzas vuelven a ser en la misma dirección de giro. El ciclo se repite.
Paso 4: El motor gira mientras haya corriente y campo magnético.
📐 Principio físico: Fuerza de Lorentz y par motor
⚡ Fórmulas clave para motores DC:
- Fuerza sobre un conductor: F = I·L·B·senθ (θ ángulo entre corriente y campo).
- Par motor (torque): τ = N·I·A·B·senφ, donde N es número de espiras, A área de la bobina, φ ángulo entre el plano de la bobina y B. Para maximizar el par, se diseña para que φ ≈ 90° (campo radial).
- Velocidad angular (ω): En vacío, ω = V / (k·Φ) donde V es voltaje aplicado, k constante del motor, Φ flujo magnético.
- Potencia mecánica: P_mec = τ·ω. Potencia eléctrica: P_elec = V·I. El rendimiento (eficiencia) es η = P_mec / P_elec (típicamente 70-95%).
⚡ Tipos de motores eléctricos (clasificación completa)
| Tipo de motor | Principio | Ventajas | Desventajas | Aplicaciones típicas |
|---|---|---|---|---|
| Motor DC con escobillas | Fuerza de Lorentz + conmutador mecánico | Control simple de velocidad (variando voltaje), par alto al arranque, bajo costo. | Escobillas se desgastan, chispas, mantenimiento, ruido eléctrico. | Juguetes, cepillos dentales, limpiaparabrisas, elevadores de coches. |
| Motor DC sin escobillas (BLDC) | Electrónica de conmutación (sensores Hall o detección de fuerza contraelectromotriz) | Alta eficiencia (85-96%), bajo mantenimiento, silencioso, larga vida. | Electrónica de control más cara, requiere controlador. | Drones, ventiladores de PC, coches eléctricos (Tesla), electrodomésticos de alta gama. |
| Motor AC asíncrono (inducción) | Inducción electromagnética: el campo giratorio del estátor induce corriente en el rotor (jaula de ardilla). | Robusto, barato, sin escobillas, prácticamente sin mantenimiento. | Difícil control de velocidad a bajo costo (requiere variador de frecuencia), el factor de potencia no es unitario. | Bombas, ventiladores industriales, compresores, lavadoras, secadoras. |
| Motor universal (serie AC/DC) | Estátor y rotor en serie, funciona con corriente continua o alterna. | Muy alto par a bajas revoluciones, alta velocidad, compacto. | Ruidoso (escobillas), baja eficiencia, peligro de embalamiento en vacío. | Taladros, aspiradoras, batidoras, herramientas eléctricas. |
| Motor paso a paso | Rotor de imán permanente o reluctancia variable; las bobinas se activan en secuencia. | Posicionamiento exacto (sin realimentación), alto par a baja velocidad, retención de posición. | Velocidad limitada, par bajo a altas rpm, consume corriente incluso parado. | Impresoras 3D, robots, cámaras CCTV, máquinas CNC, discos duros (antiguos). |
| Motor síncrono de imán permanente (PMSM) | Rotor con imanes permanentes, estátor con campo giratorio síncrono (controlado por electrónica). | Alta eficiencia, densidad de par elevada, control preciso. | Coste más alto que inducción, requiere controlador vectorial. | Coches eléctricos (mayoría actuales), robots industriales, servomotores. |
📊 Curva característica par-velocidad de un motor DC
En un motor DC típico (excitación independiente o imán permanente), el par τ es máximo en el arranque (cuando la velocidad es cero) y disminuye linealmente hasta cero en la velocidad máxima (en vacío). La corriente de arranque puede ser muy alta (5-10 veces la nominal), por lo que se necesitan limitadores o arrancadores.
La fuerza contraelectromotriz (fem) es clave: cuando el motor gira, las bobinas cortan las líneas de campo y generan un voltaje inducido (como en un generador) que se opone al voltaje aplicado (Ley de Lenz). La fem es proporcional a la velocidad: E = k·Φ·ω. Por tanto, la corriente en el motor es I = (V – E)/R. Al aumentar la velocidad, E aumenta, disminuyendo la corriente y el par. Por eso el motor alcanza una velocidad de equilibrio.
💡 Control de velocidad:
– Variando el voltaje aplicado (PWM, reguladores de tensión): más voltaje → más velocidad.
– Variando el flujo del campo (en motores de excitación separada): reduciendo flujo se aumenta velocidad (pero disminuye el par).
– Usando resistencias en serie (anticuado, ineficiente).
🔁 Motor como generador: La reversibilidad
Si haces girar mecánicamente un motor DC (por ejemplo, con una manivela), en sus bornes aparecerá un voltaje. El motor se comporta como un generador. Por eso los coches eléctricos y los patinetes utilizan el frenado regenerativo: en las frenadas, el motor pasa a funcionar como generador, convirtiendo la energía cinética en electricidad que recarga la batería. Esto aumenta la eficiencia global hasta un 20% en ciudad.
⚙️ Construye un motor DC casero (experimento)
🔨 Materiales: Una pila de 1,5 V, un imán de neodimio pequeño, un clip de acero, un poco de cable de cobre esmaltado (30 cm), un trozo de cartón o madera para base, cinta aislante.
Pasos (motor homopolar simple):
- Dobla el clip en forma de soporte para colgar la bobina.
- Enrolla el cable esmaltado formando una bobina de 5-10 vueltas, dejando dos extremos rectos de 5 cm. Raspa el esmalte de los extremos para que conduzcan.
- Coloca el imán sobre la base, justo debajo de la bobina.
- Conecta la pila al soporte de modo que la bobina quede en serie. Al pasar corriente, la bobina girará. Puede que necesites ajustar el ángulo y la posición del imán.
Explicación: La corriente en la bobina interactúa con el campo del imán, produciendo una fuerza tangencial (Lorentz) que hace girar la bobina. Como no hay conmutador, el motor no gira continuamente (o lo hace de forma errática). Para un motor que gire bien, necesitarías un conmutador.
🧠 Ejercicios prácticos (con soluciones detalladas)
Ejercicio 1 (Par motor básico): Una bobina rectangular de 10 cm × 5 cm tiene 100 espiras y está inmersa en un campo magnético radial de 0,3 T. Circula una corriente de 2 A. Calcula el par máximo (cuando la normal a la bobina es perpendicular al campo).
✅ Ver solución
Área A = 0,1 × 0,05 = 0,005 m². Par máximo τ = N·I·A·B = 100·2·0,005·0,3 = 100·2·0,0015 = 0,3 N·m.
Ejercicio 2 (Velocidad de un motor DC): Un motor DC tiene una constante k=0,02 V·s/rad. Se alimenta con 12 V y la fuerza contraelectromotriz a plena carga es de 10 V. La resistencia del inducido es 0,5 Ω. Calcula la corriente, la velocidad angular y el par si el flujo es constante.
✅ Ver solución
I = (V – E)/R = (12-10)/0,5 = 4 A. E = k·ω → ω = E/k = 10/0,02 = 500 rad/s = 500·60/(2π) ≈ 4775 rpm. Par τ = k·I = 0,02·4 = 0,08 N·m.
Ejercicio 3 (Potencia y eficiencia): Un motor consume 240 W eléctricos (24 V, 10 A). En el eje se mide una potencia mecánica de 200 W. Calcula la eficiencia y las pérdidas. ¿Dónde se disipan principalmente esas pérdidas?
✅ Ver solución
η = P_sal / P_ent = 200/240 = 0,833 = 83,3%. Pérdidas = 40 W. Se disipan principalmente en: efecto Joule en las bobinas (I²·R), pérdidas por histéresis y corrientes de Foucault en el núcleo, pérdidas mecánicas por rozamiento (escobillas, rodamientos).
Ejercicio 4 (Motor de inducción): Un motor de inducción de 4 polos se conecta a una red de 50 Hz. Calcula la velocidad síncrona. Si el deslizamiento a plena carga es del 4%, ¿cuál es la velocidad real?
✅ Ver solución
Velocidad síncrona: n_s = (120·f)/p = (120·50)/4 = 1500 rpm. Deslizamiento s = 0,04 → n = n_s·(1-s) = 1500·0,96 = 1440 rpm.
Ejercicio 5 (Motor paso a paso): Un motor paso a paso tiene 200 pasos por revolución. ¿Cuál es el ángulo por paso? Si se le aplica una frecuencia de pulsos de 1000 Hz, ¿a qué velocidad gira (rpm)?
✅ Ver solución
Ángulo por paso = 360°/200 = 1,8°. Velocidad angular = (número de pasos/s) × (1,8°/paso) = 1000 × 1,8 = 1800°/s. Revoluciones por segundo = 1800/360 = 5 rps → rpm = 5×60 = 300 rpm.
🌍 Aplicaciones cotidianas de los motores eléctricos
🏠 Hogar
- Lavadoras (motor de inducción o BLDC), neveras (compresor con motor de inducción), ventiladores (motor universal o de inducción), secadores (motor universal), aspiradoras (motor universal).
🚗 Transporte
- Coches eléctricos (BLDC o PMSM), patinetes eléctricos (BLDC), bicicletas eléctricas (BLDC hub motor), trenes (motores de inducción o síncronos de imanes permanentes).
🏭 Industria
- Cintas transportadoras (inducción), bombas (inducción), compresores (inducción), máquinas-herramienta (servomotores BLDC o paso a paso).
📱 Electrónica
- Discos duros (motor BLDC de husillo), ventiladores de PC (BLDC sin escobillas), drones (BLDC de alta velocidad).
📖 Glosario
- Fuerza contraelectromotriz (CEMF): Voltaje generado por el motor al girar, opuesto a la alimentación.
- Deslizamiento (s): Diferencia relativa entre velocidad síncrona y velocidad real en motores de inducción.
- Jaula de ardilla: Rotor de barras de aluminio o cobre cortocircuitadas, típico de motores de inducción.
- Servomotor: Motor de precisión con realimentación de posición (encoder o resolver).
- PWM: Modulación por ancho de pulso, técnica para variar la tensión efectiva en motores.
📚 Magnetismo
- 🧲 Imanes: propiedades magnéticas
- 🌍 Campo magnético terrestre
- ⚡ Relación magnetismo-electricidad
- 🔧 Electroimán: aplicaciones
- ⚙️ Motores eléctricos: funcionamiento – Estás aquí
¡Has completado el Cluster 70! Continúa con el Cluster 71: Óptica y Luz.







Publicar comentario